Robot
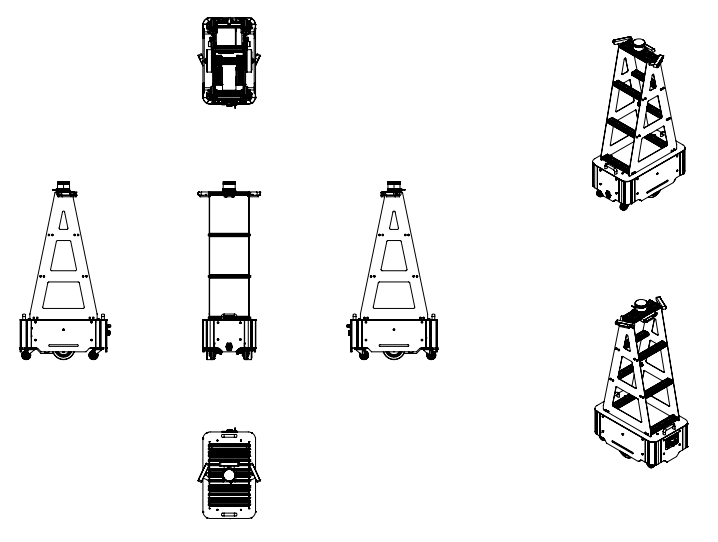
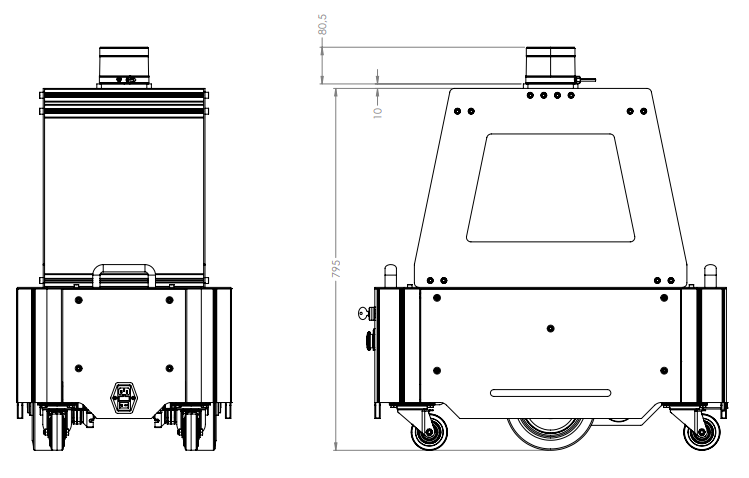
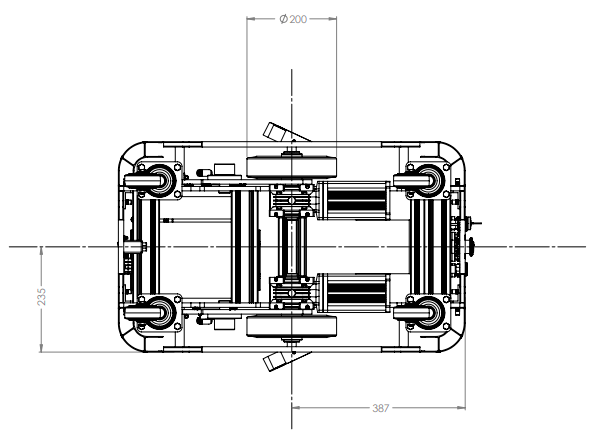
RoboVoyager is a differential robot. It has 2 differential wheels and 4 smaller supporting wheels that aren't operable, a base, and a stand part. The base contains a battery and motors inside it, while the stand has a camera and lidar mounted on top. It also has a power button, emergency and LED buttons, of which 2 are disabled, and the red one powers the motors when pressed in. Emergency button is portruded out and if the robot collides from the front, it will disable the motor functions
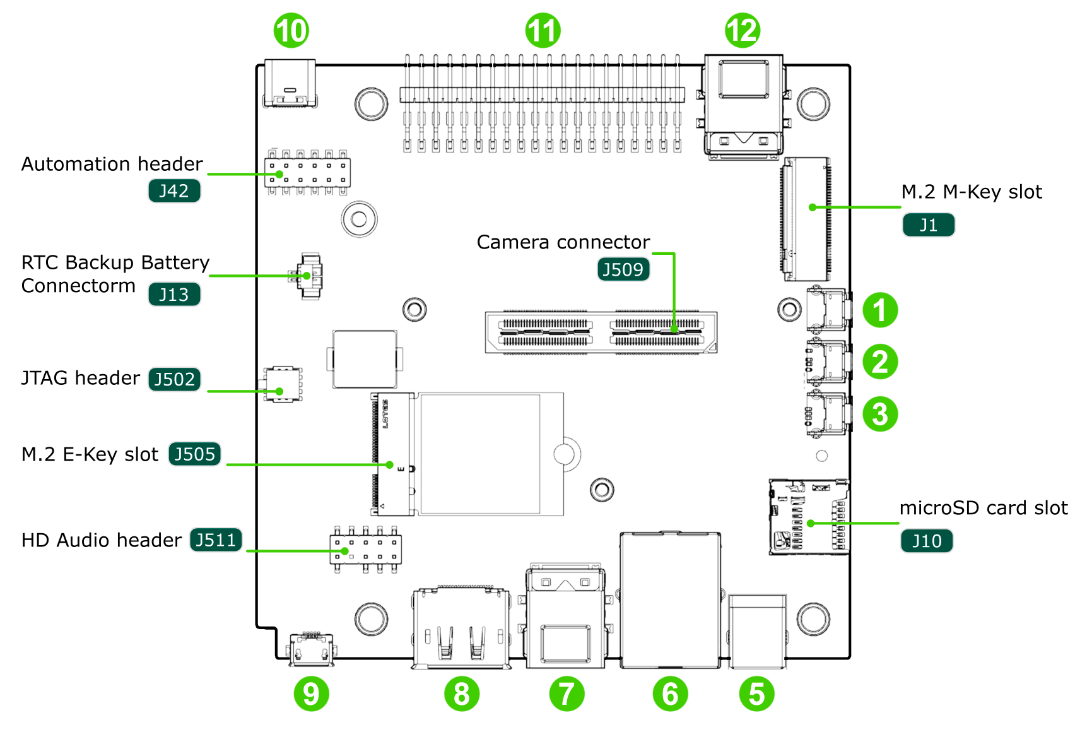
Computer
The robot's computer is NVIDIA Jetson AGX Orin. It specializes in delivering image processing, artificial intelligence related tasks, real-time sensor fusion, deep learning acceleration, making it ideal development kit for complex robotics applications. Compared to traditional computers, the Jetson Orin offers superior efficiency and performance-per-watt, enabling longer battery life and more responsive robotic operations


Dimensions
- Dimensions: 110 mm (length) x 110 mm (width) 72 mm (height)
CPU
- Model: Arm® Cortex®-A78AE v8.2 64-bit
- Core count: 12
- Max frequency: 2.2 GHz
- Memory: L2 (3 MB) + L3 (6 MB)
GPU
- Model: GA10B
- Cores: 2048 (CUDA), 64 (Tensor)
- Memory: 64 GB LPDDR5 (1300 MHz) 256 bit bus
- Graphics features: DirectX 12, OpenGL 4.6, OpenCL 3, Vulkan 1.3, CUDA 8.6
- TDP: 60 W
- Dimensions: 100 mm (length) x 87 mm (width)
AI Performance
- 275 TOPS (INT8)
Display
- 1 x 8K60 multi-mode DP | 1.4a (+MST)/eDP | 1.4a/HDMI 2.1
CSI Camera
- Up to 6 cameras (16 via virtual channels)
- 16 lanes MIPI CSI-2
- D-PHY 2.1 (up to 40Gbps), C-PHY 2.0 (up to 164Gbps)
Video Encode
- 2 x 4K60 | 4 x 4K30 | 8 x 1080p60 | 16 x 1080p30 (H.265) H.264, AV1
Video Decode
- 1 x 8K30 | 3 x 4K60 | 7 x 4K30 | 11 x 1080p60| 22 x 1080p30 (H.265) H.264, VP9, AV1
Storage
- 64GB eMMC 5.1
Networking
- 1 x GbE
- 1 x 10GbE
UPHY
- 2 x 8 | 1 x 4 | 2 x 1 (PCIe Gen4, Root Port & Endpoint), 3 x USB 3.2
Other I/O
- 4 x USB 2.0 | 4 x UART | 3 x SPI | 4 x I2S | 8 x I2C | 2 x CAN, DMIC & DSPK, GPIOs
Power
- Profiles: 15 W, 30 W, 50 W, MAXN (60 W)
Peripherals
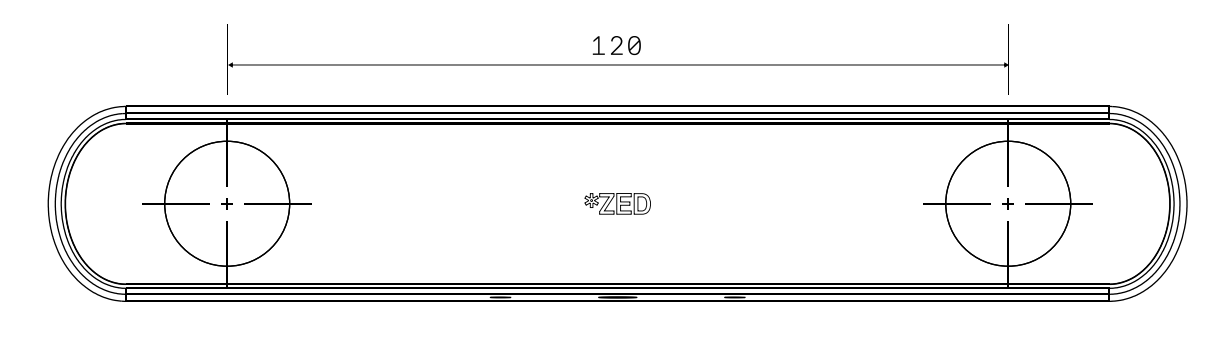
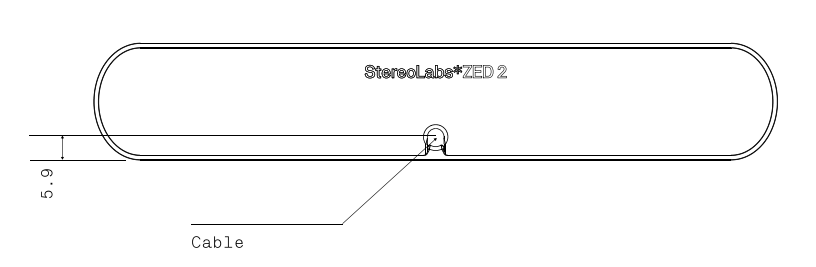
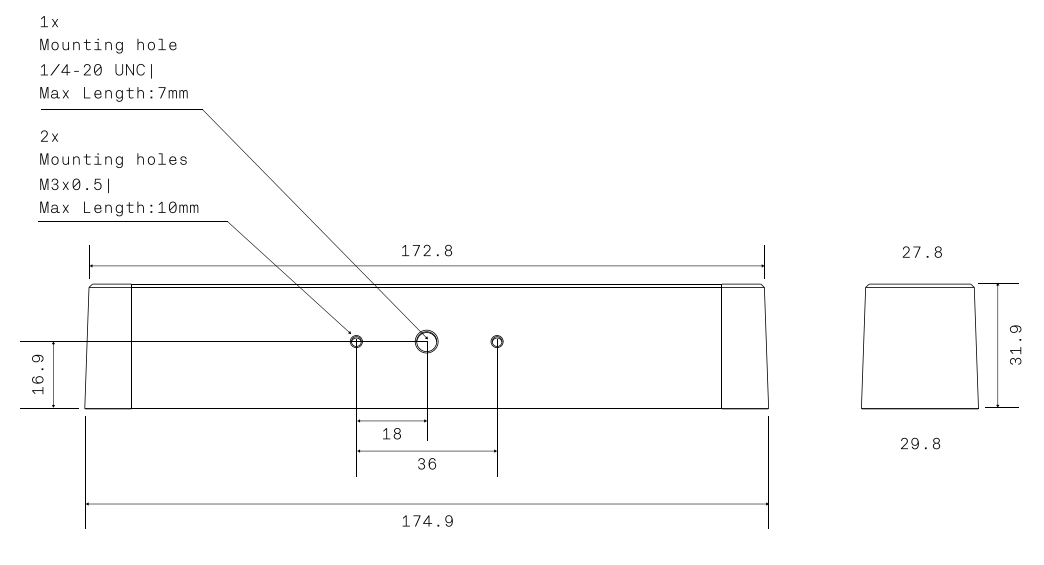
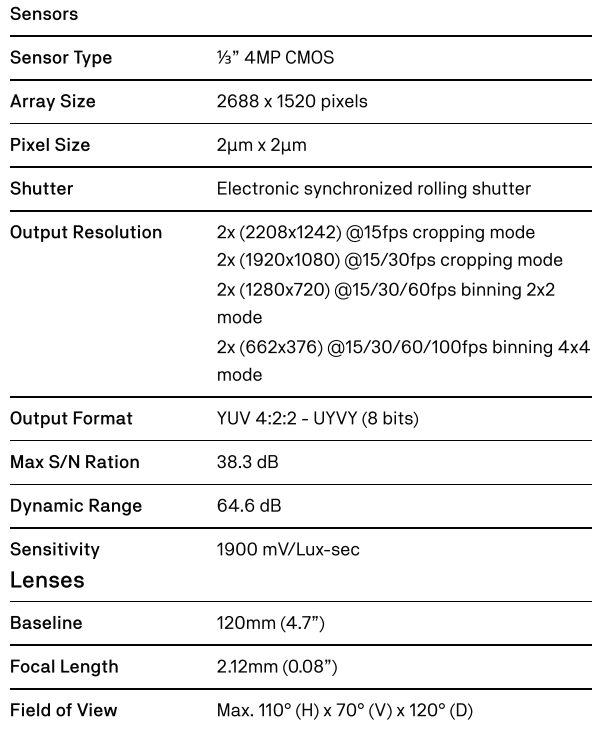
Camera
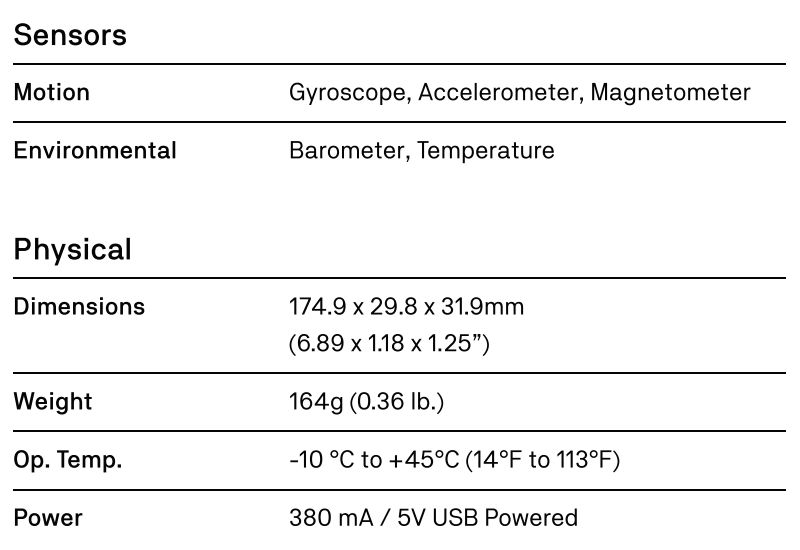
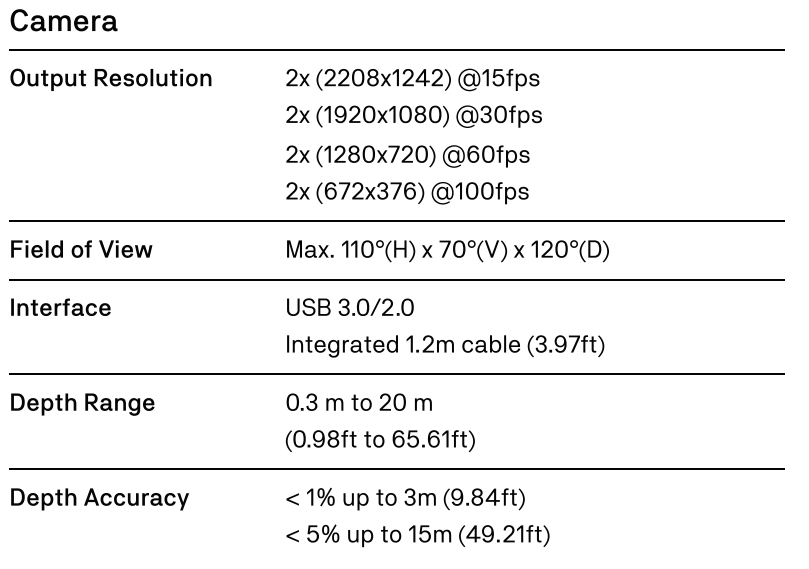
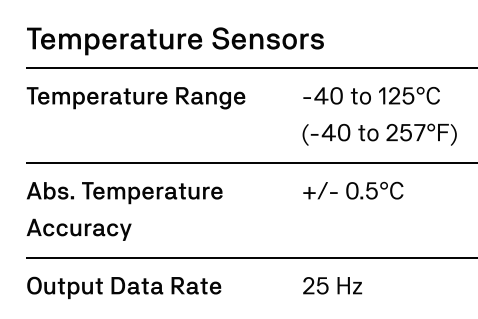
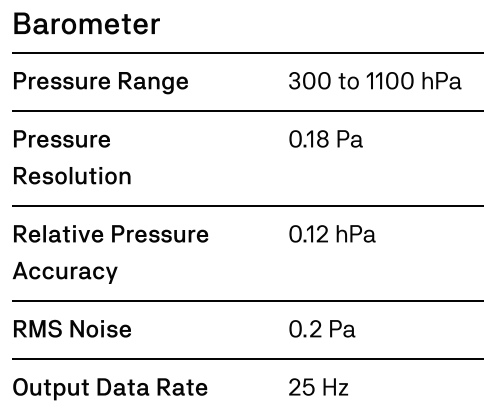
The Zed 2 is a stereo camera, built for depth perception, motion tracking, and spatial AI, making it a versatile tool for various applications. It boasts an Accelerometer, Barometer, Magnetometer, Inertial Measurement Unit (IMU), a 120° Wide-Angle view, and various resolutions, up to 4K. The Zed 2 is a perfect camera in combination with Jetson Orin for ROS projects



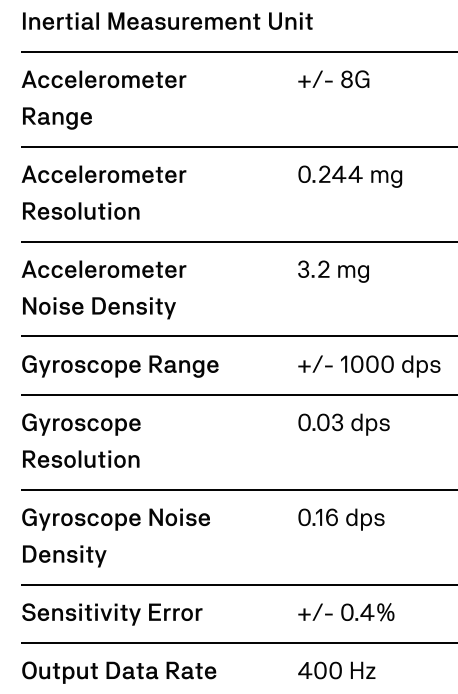
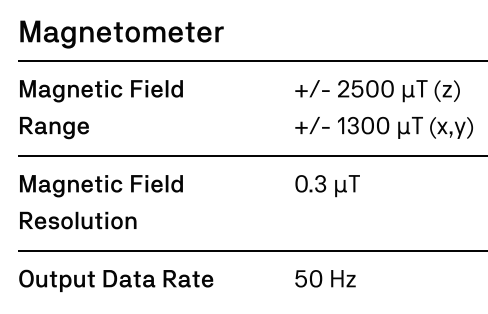
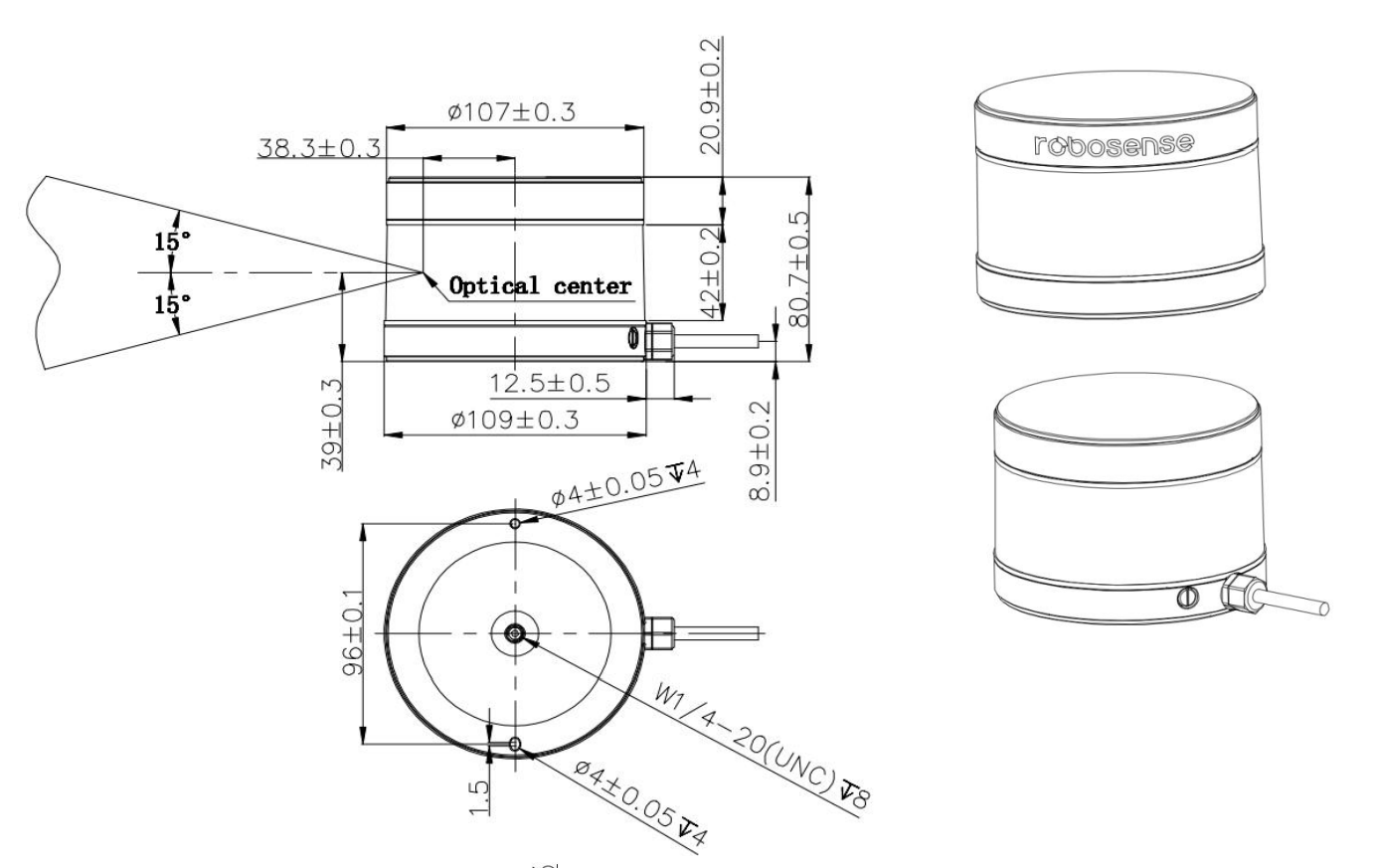
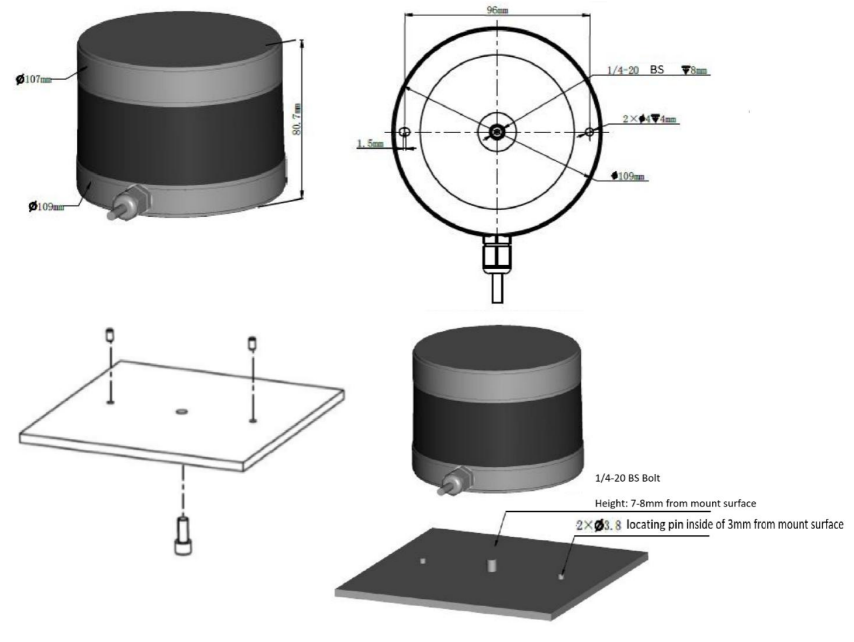
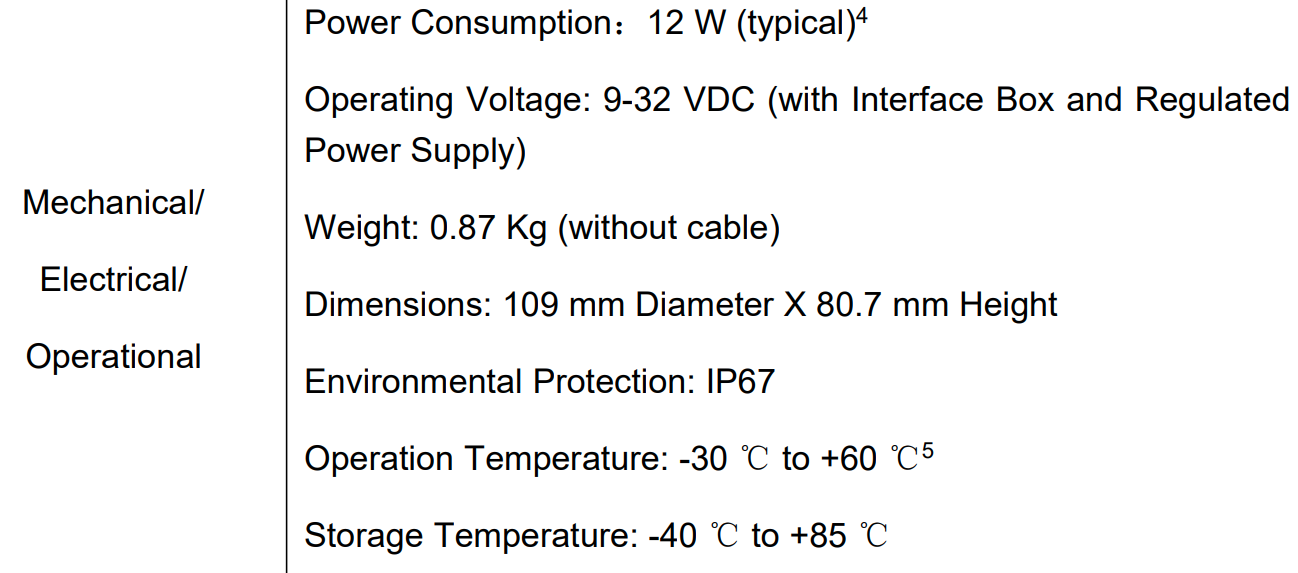
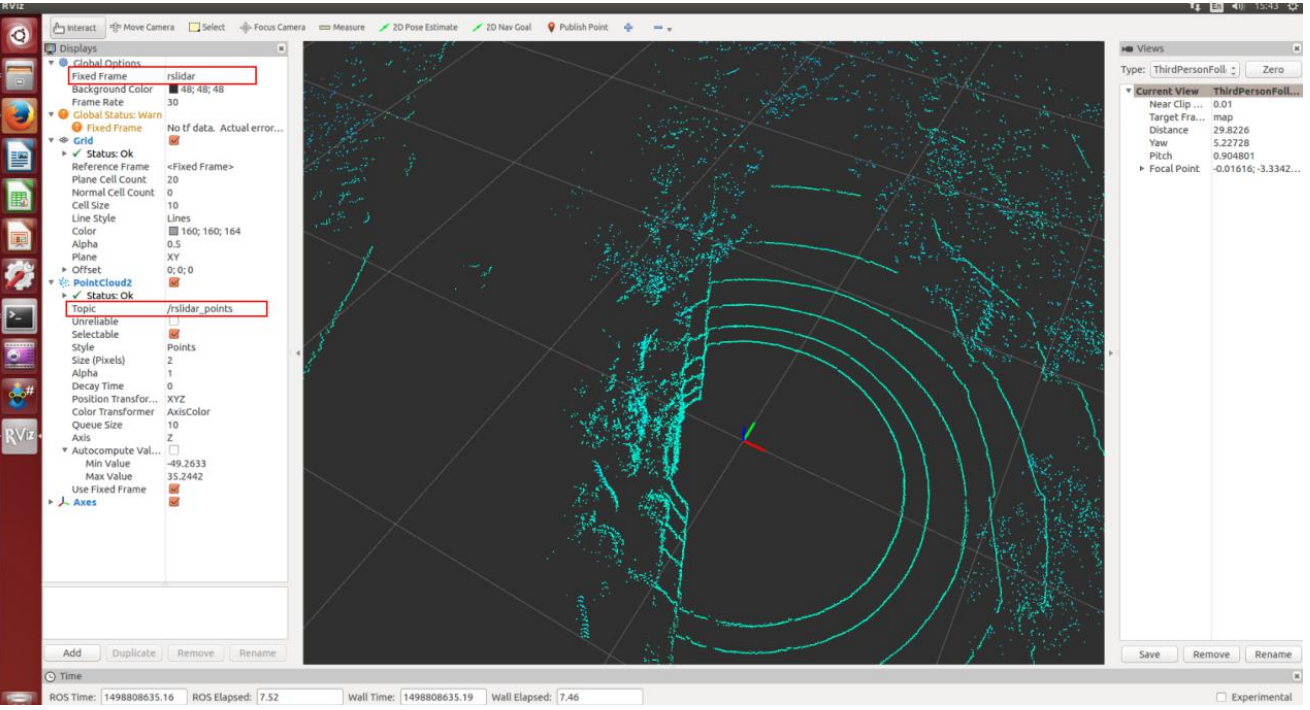
Lidar
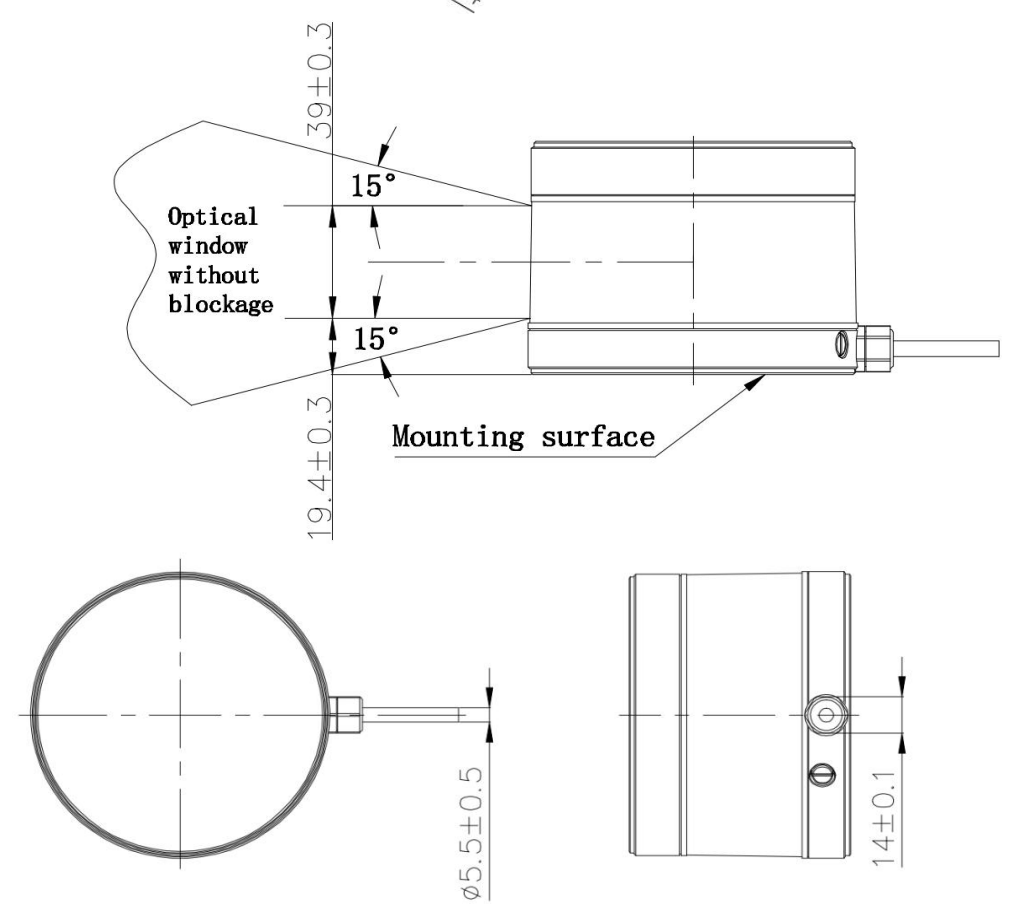
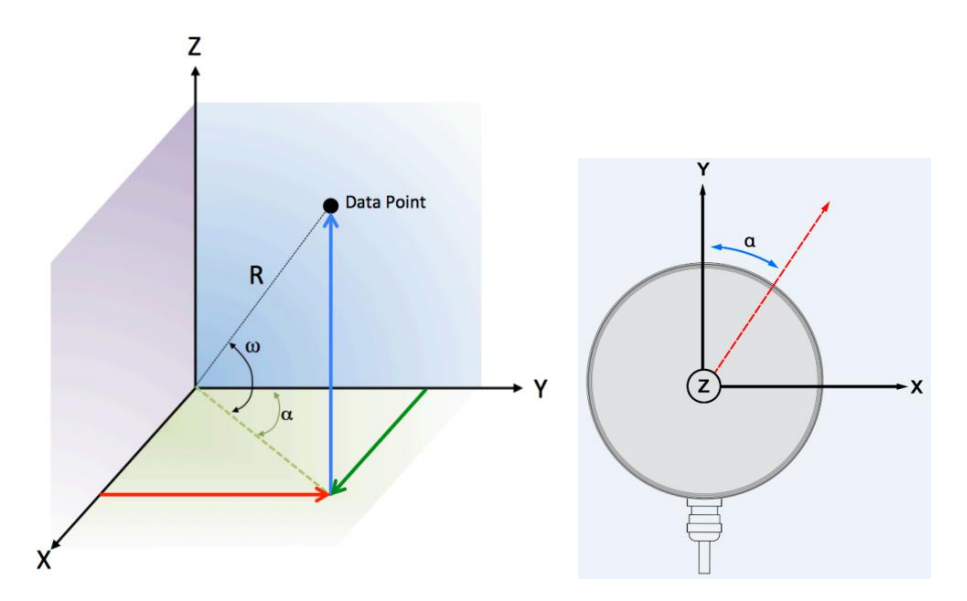
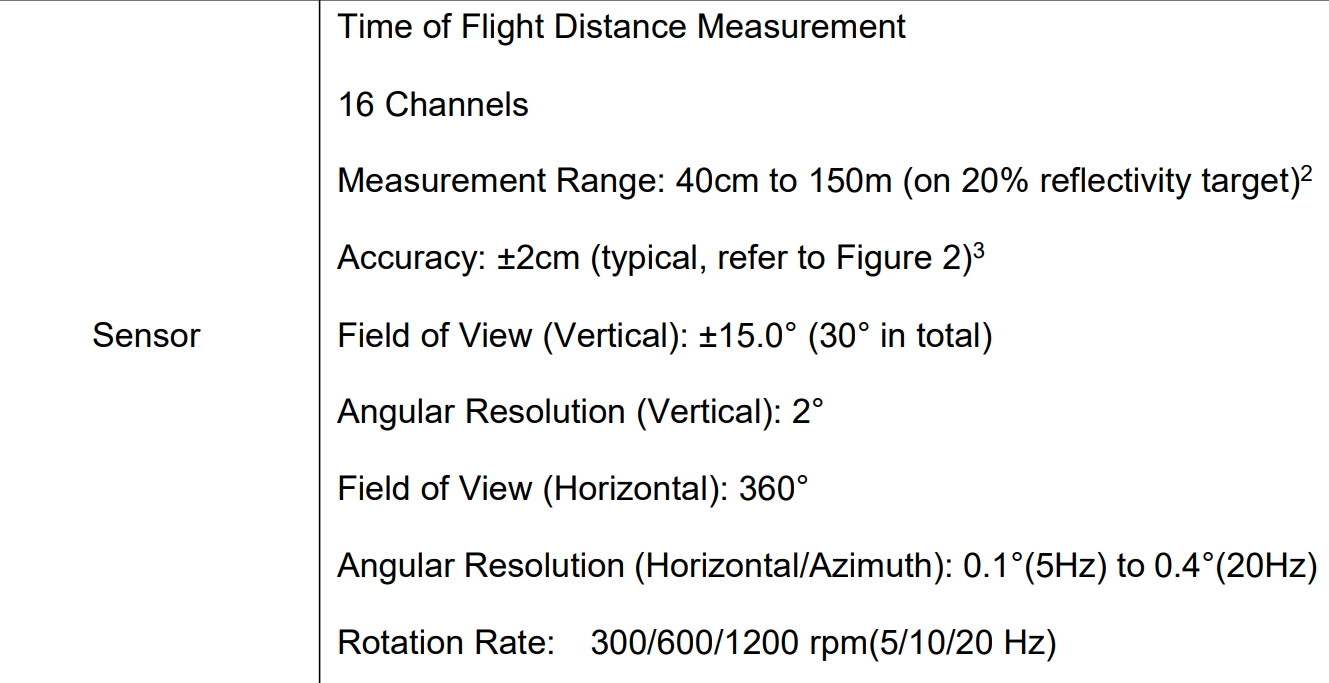
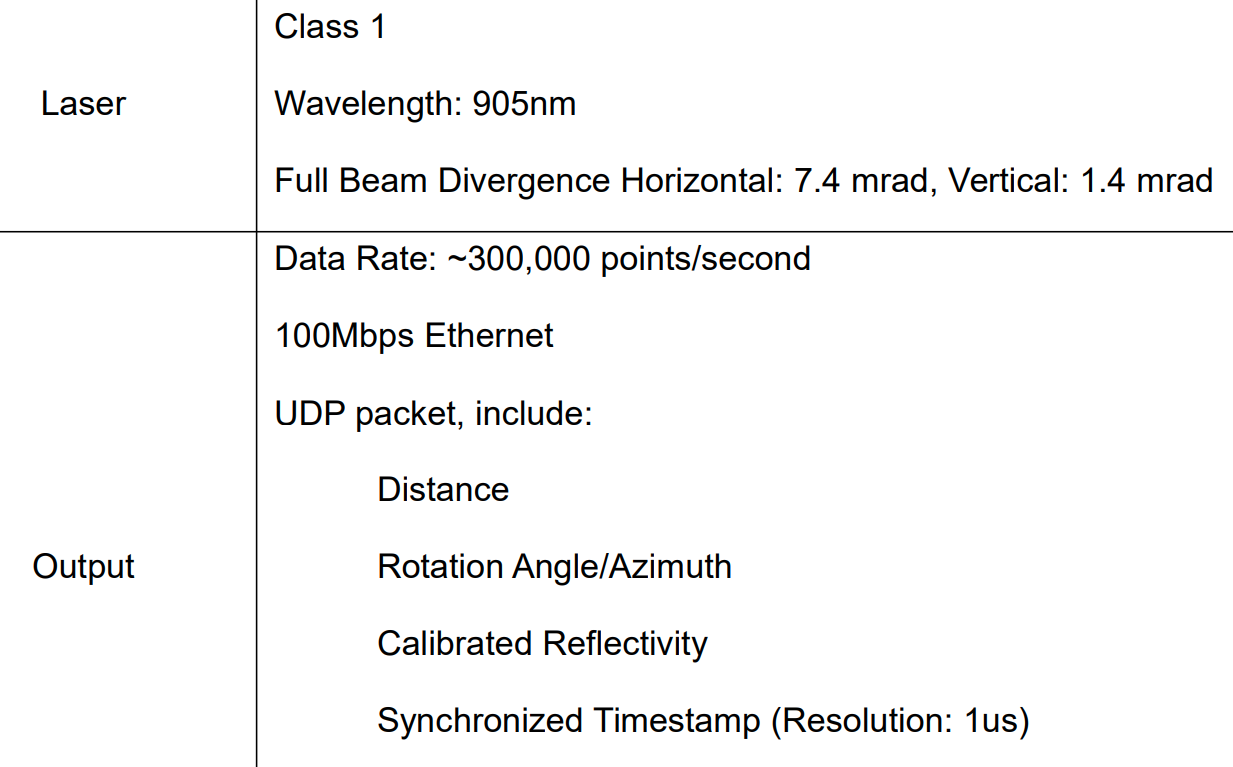
The Robosense RS Lidar 16 is used for detecting terrain and surroundings of the robot. It rapidly emits pulse light waves (288,000 pts/s), that bounce back to the lidar head. It then calculates the time travelled for each wave and forms a precise 3D map (point cloud). The Helios 16 lidar is suitable for variety of applications, including: autonomous driving, vehicle-to-roadside (V2R, wireless vehicle communication), robototics and industrial uses. Its main features are: 150m range, 2cm range accuracy and temperature resistance (-30°C to +60°C).

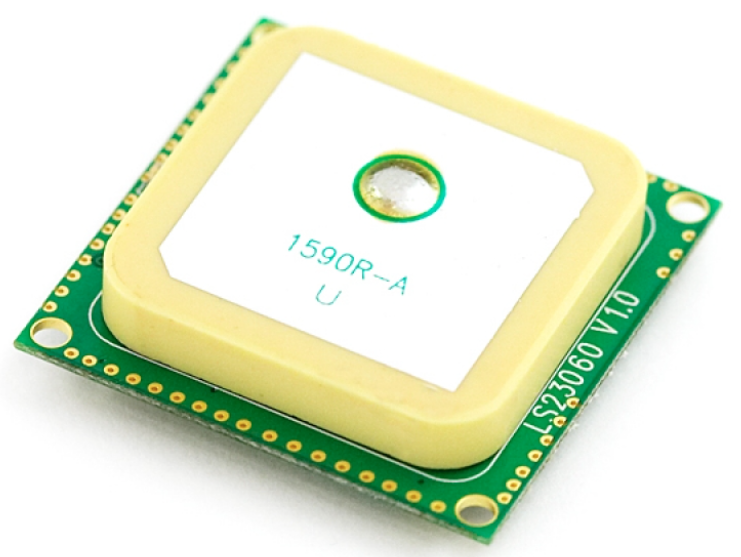
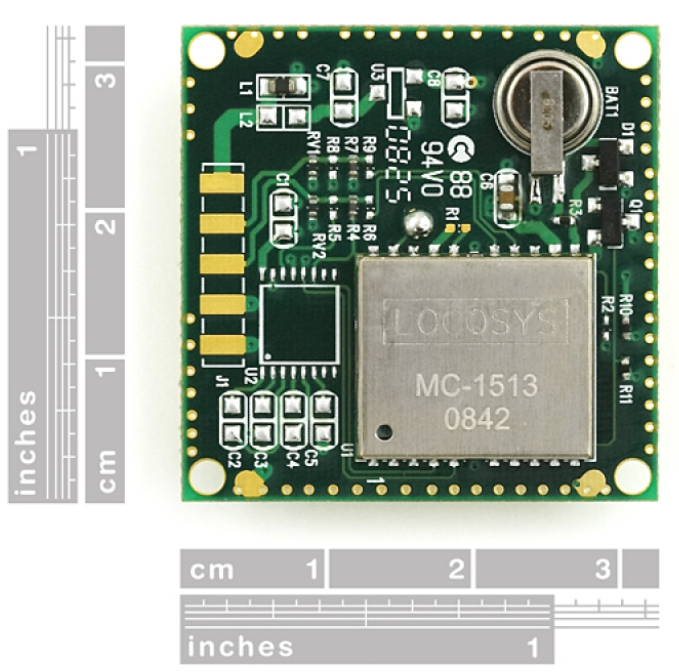
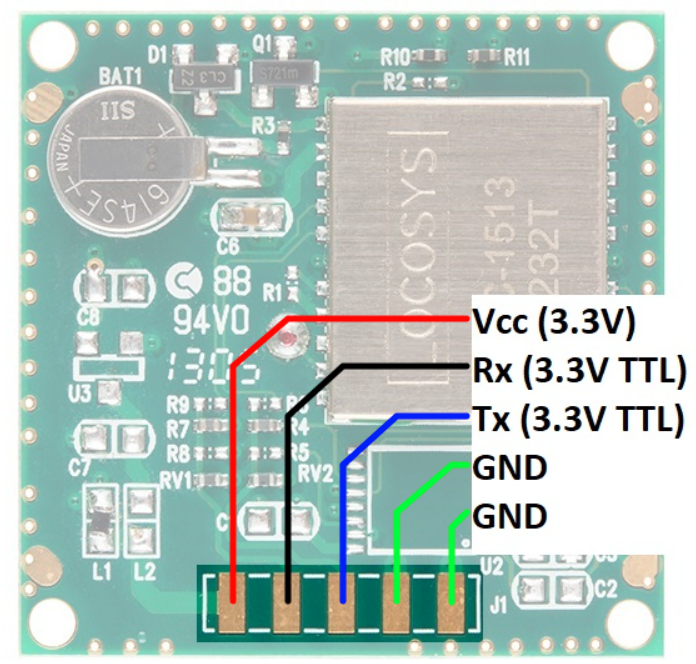
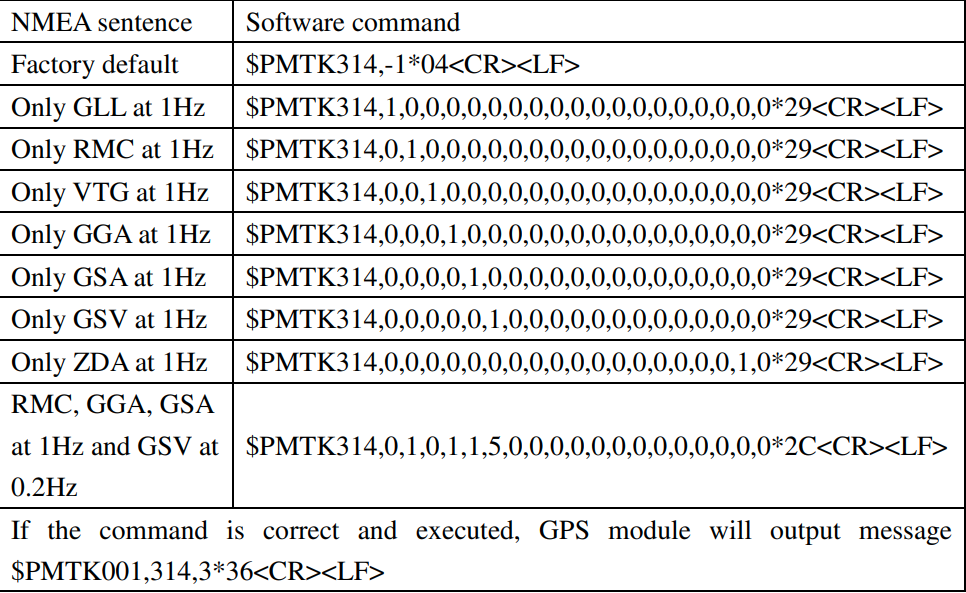
GPS
The LOCOSYS LS20031 GPS receiver integrates a MediaTek 66-channel chip with a ceramic antenna to create a complete GPS module that can track up to 66 GPS satellites at a time. The GPS module supports up to a 10Hz update rate, a built-in rechargeable battery for rapid satellite acquisition (external power is still required for normal operation), and more than 6 different NMEA ASCII sentences that are output to a 3.3 V TTL-level serial port.